QL-L-1: The Railway Watcher
Within the system of a quadrilateral a strange phenomenon pops up.
Often when a QL-line becomes known there also is a parallel line that requires attention. And moreover there is also a prominent point at the same distance from one of the lines as the distance between the QL-line and the parallel line.
I call this the system of a Railway Watcher because the parallel lines can be represented as a railroad and the point at a minimal distance from the railway as a “railway watcher”.
Examples:
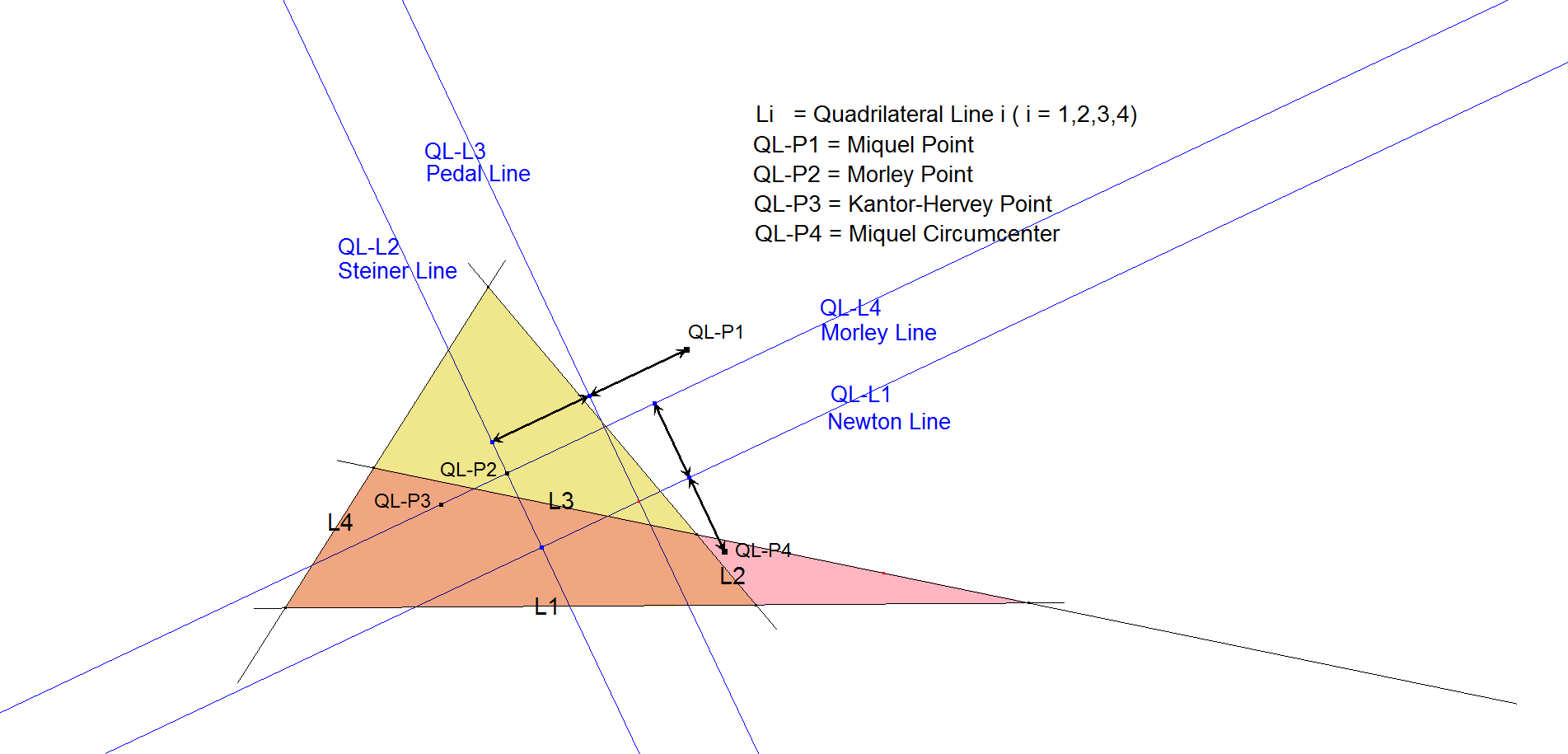
In next picture
- QL-P1 is Railway Watcher of lines QL-L2 (Steiner Line) and QL-L3 (QL-Pedal Line).
- QL-P4 is Railway Watcher of lines QL-L1 (Newton Line) and QL-L4 (Morley Line).
Notable is that both railways cross at right angles.
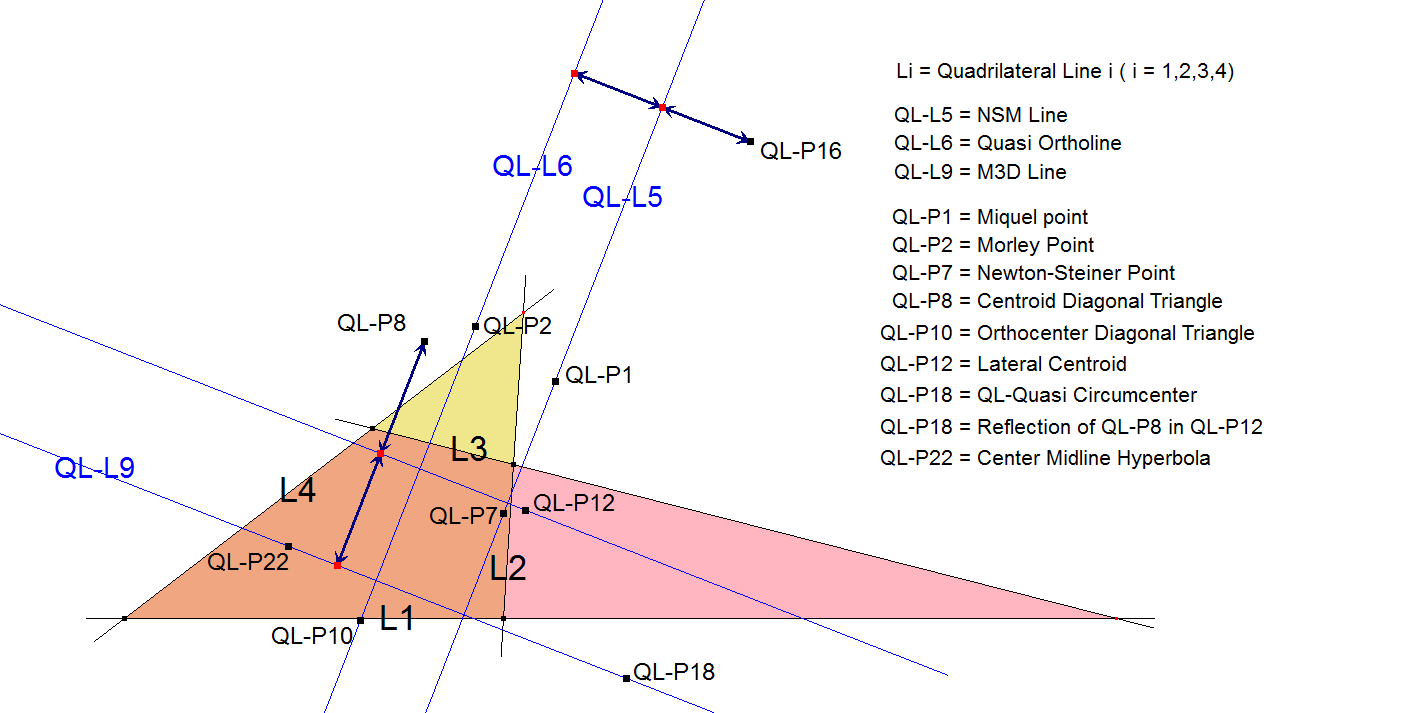
In next picture
- QL-P8 is Railway Watcher of lines QL-L9 (M3D Line) and line // QL-L9 through QL-P12.
- QL-P16 is Railway Watcher of lines QL-L5 (NSM Line) and QL-L6 (Quasi OrthoLine).
Again both railways cross at right angles.
In next picture
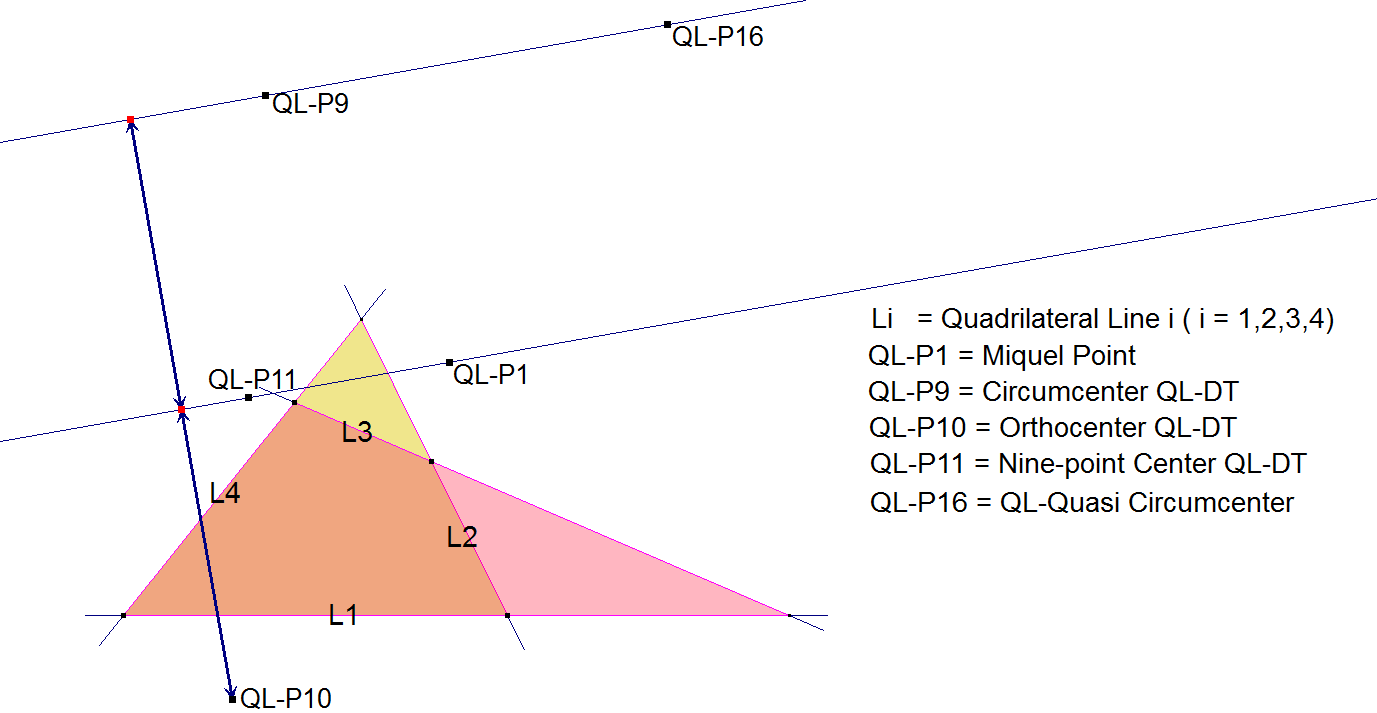
This system of Railway Watchers can be coincidental, but still it is a remarkable item.
See QL-Cu1 and QG-Co3 for other Railway Watchers where the Newton Line and an asymptote form a railway.
See also QG-P1 where QG-P1 is the Railway Watcher of the 1st and 2nd QG-Quasi Euler Line QG-L4 and QG-L5.
QL-Cartesian Systems
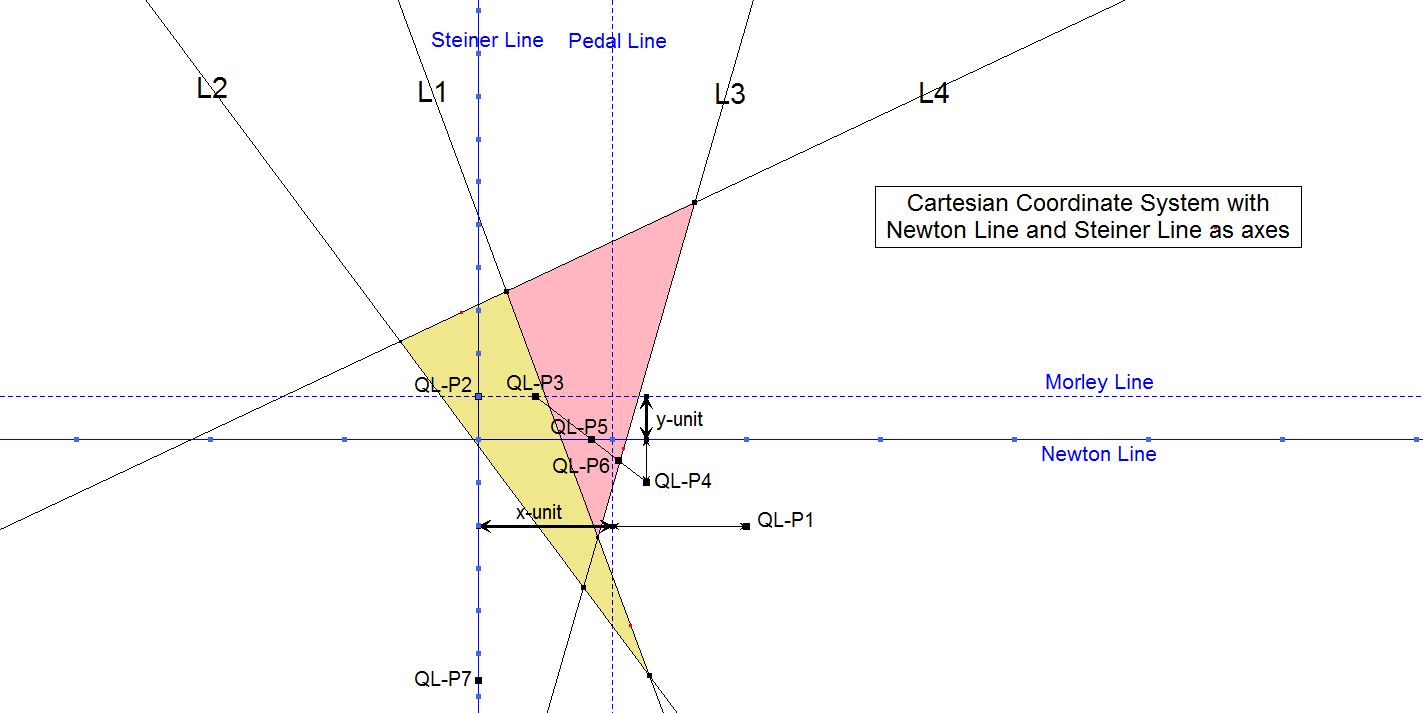
The four most outstanding lines of a quadrilateral are the Newton Line, the Steiner Line, the QL-Pedal Line and the Morley Line.
They form a formidable rectangular construction with a special role for the Miquel Point (QL-P1) and The Miquel Circumcenter (QL-P4).
Especially because:
- d (QL-P1, QL-L3) = d (QL-L2, QL-L3) = d (QL-P2, QL-L3),
- d (QL-P4, QL-L1) = d (QL-L4, QL-L1) = d (QL-P2, QL-L1).
Since Steiner Line/QL-Pedal Line and Newton Line/Morley Line are parallel and Steiner line/Newton Line are perpendicular lines, these lines can function as a Cartesian coordinate system with Steiner and Newton Line as axes. Moreover the difference in distances of the parallel lines can function as units at the axes. This would look like this:
Quadrilateral Points
Now all points QL-P1 to QL-P7 have these Cartesian coordinates (relating to CT-coordinates):
| Point | x-coordinate | y-coordinate |
|---|---|---|
| P1 | 2 | Y1·Y2 |
| P2 | 0 | +1 |
| P3 | 2X1 / X3 | +1 |
| P4 | (2X2 – 2X1) / (3X3) | –1 |
| P5 | (X2 + 2X1) / (3X3) | 0 |
| P6 | X2 / (2X3) | –½ |
| P7 | 0 | 0 |
The units used are:
X3 / (8 AL53)AL32 / (16 ABC AL5 LM12)
where:
X1 = AL1 . AL52Y1 = LM1 / AL3
X2 = ABC . AL2 . AL5Y2 = ABC . AL6 / AL5
X3 = ABC2 . LM0 . LM12
and:
ABC = (-a + b + c) (a – b + c) (a + b – c) (a + b + c)
LM0 = l m n
LM1 = (l – m) (m – n) (n – l)
AL1 = (a4 + b2 c2) (2l – m – n) + (b4 + c2 a2) (2m – n – l) + (c4 + a2 b2) (2n – l – m)
AL2 =-a2 (l – m) (n – l) (3 l m2 – 8 l m n + m2 n + 3 l n2 + m n2)
-b2 (l – m) (m – n) (3 l2 m + l2 n – 8 l m n + l n2 + 3 m n2)
-c2 (n – l) (m – n) (l2 m + l m2 + 3 l2 n – 8 l m n + 3 m2 n)
AL3 = -(l – m) (m – n) (n – l) (a4 (l m – m n + n l) + b4 (l m + m n – n l) + c4 (-l m + m n + n l))
-(l2 m2 + m2 n2 + n2 l2 – l m n (l + m + n)) (2 b2 c2 (m – n) +2 c2 a2 (n – l) + 2 a2 b2 (l – m))
AL5 = a2 mn(l-m)(l-n) + b2nl(m-l)(m-n) +c2 lm(n -l)(n-m)
AL6 = a2 mn(l-m)(l-n)(-lm-ln+mn) + b2 nl(m-l)(m-n)(-lm+ln-mn) + c2 lm(n-l) (n-m) (lm-ln-mn)
Quadrilateral Lines
- The Pedal Line has equation x = 1.
- The Morley Line has equation y = 1.
One advantage of this system is that working with circles is easier in a Cartesian coordinate system than in a barycentric/trilinear coordinate system.
Estimated human page views: 923